We did! It was incredible... Things have been so crazy I've hardly had a chance to even think about logging our success. I guess I should though...
It truly was a thing of luck/beauty. Our robot, Andromeda performed in a mediocre range throughout the competition. The team, however, did an excellent job of screaming our strengths from the rooftops instead of worrying all day about our weaknesses. We, a 3 year old (very new and inexperienced for FRC) team with limited resources (I suppose all teams have limited resources but sometimes it sure feels like ours are very limited) were the FIRST team to use the Kinect driver station during hybrid mode to control our robot. Even by the end of the competition, out of 50 teams many of which have been around for years and years, we were 1 of 3 teams to get the Kinect working. This is one example of a strength we screamed from the rooftops. Whenever our Kinect driver used the Kinect, the ENTIRE team stood up in the stands and mimicked his every move (arms and legs flailing). Whenever the team posed for a picture, everyone crossed their arms across their chest (the "default" position in our Kinect driver program). Another strength we focused on was our continued structure in game strategy, and ability to follow the plan we made at the beginning of the season. We were never planning on making a shooting robot. That was not the idea, so we were never expecting/ed to score. We are a defensive and assisting robot that gets to the opposite side of the field, blocks the opponent, and gets balls to the home side of the field. These two things appealed greatly to the number one alliance during the alliance picking, and we were chosen by the number one and number three seeded teams as an alliance partner.
After that, we went through every elimination round undefeated and proceeded to celebrate.
22.3.12
6.3.12
Apologies
I would like to apologize for having to take down a significant portion of my prior work on this log; a lot of what I have written about is quickly becoming rather confidential because I am applying for a patent and the FIRST Future Innovator Award for the material in question. Once I have moved past the legal humps I plan on re-publishing all the material that has been taken down.
5.3.12
What next?
For the next week and a half the team will be preparing for competition. The year, as far as robotics is concerned, will climax with 3 crazy 18-hour days of hurried preparations, even more hurried repairs, and a few choice minutes of adrenaline-quenched Rebound Rumble. A handful of teams will go on to Championships and experience the whole thing over again on a 10x scale.
But what about the rest of us? What is the next move? There are a million answers, for each of a millions ways of answering that question...
My answer is that I would like the team to become a company in all but the literal, legal sense of the word. Being a member of the team, like being an employee of a company, should be a privilege, not a right. Those who do not show up for work, or are not productive during the workday will be reprimanded, and if necessary, removed from the company. True accountability is yet to be achieved in this team; while what I saw this year was exponentially better than the first year I was with this team in 2010, it still needs to be improved to be a competitive team. Deadlines must be exactly that: DEAD lines. If you cross a deadline, you are, in one way or another, dead. There is no leeway, no play, no tolerance. If the robot is to be finished by 2 weeks into the build period, then that is to happen at all costs.
Another thing I would like to bring to the team is goal-based operation. One set of goals that mandates every decision, action, and lack of action on the team. Every single decision the team makes throughout the entire year is based on one set of parameters, the team goal(s), and absolutely nothing else. It is my belief that this will increase the effectiveness of nearly all decisions made on this team.
While researching on Chief Delphi, I came across a truly incredible custom gearbox build by team 192. Here is a picture...

But what about the rest of us? What is the next move? There are a million answers, for each of a millions ways of answering that question...
My answer is that I would like the team to become a company in all but the literal, legal sense of the word. Being a member of the team, like being an employee of a company, should be a privilege, not a right. Those who do not show up for work, or are not productive during the workday will be reprimanded, and if necessary, removed from the company. True accountability is yet to be achieved in this team; while what I saw this year was exponentially better than the first year I was with this team in 2010, it still needs to be improved to be a competitive team. Deadlines must be exactly that: DEAD lines. If you cross a deadline, you are, in one way or another, dead. There is no leeway, no play, no tolerance. If the robot is to be finished by 2 weeks into the build period, then that is to happen at all costs.
Another thing I would like to bring to the team is goal-based operation. One set of goals that mandates every decision, action, and lack of action on the team. Every single decision the team makes throughout the entire year is based on one set of parameters, the team goal(s), and absolutely nothing else. It is my belief that this will increase the effectiveness of nearly all decisions made on this team.
While researching on Chief Delphi, I came across a truly incredible custom gearbox build by team 192. Here is a picture...

Season's over, finishing things up...
Well... It's been a long time since I logged anything. Too long. We bagged the robot Tuesday night at 12. Most of the team was in the lab past midnight, and I got a ride home with Mr Reif at about 2am.
Based on a 30 lb repairs and upgrades rule, we withheld the Flinger (one of our various names for the shooting mechanism) in order to continue working on it. We encountered torque problems with the drive-train using only 2 CIM motors, so we changed to 4 on the drive-train. This means that we are no longer able to use a CIM motor on the Flinger (rules mandate no more than 4 CIMs on any one robot). Since bag n' tag we have been working on putting together a custom gearbox with inputs for up to 4 BaneBots 550 motors in lieu of a CIM. The likelihood that we will require all 4 to achieve the power we want in the Flinger is low. More likely we will end up using 2 or 3, however due to the incredible torque of the BB550, and our gearing down it may be possible to achieve the results we require with only 1 motor. Isaac Lozano was in charge of that project, and I helped out some when he wasn't around. Since then most of the parts have been fabricated, and we met for a small group session on Sunday with half a dozen of the mechanical team to get a good idea of what will be happening on the project, and prepare for it.
Since I last logged anything I worked on pneumatics for a short period (I was in charge of that subsystem), many mechanical people worked on the disaster that ending up not being tank treads. We had too many last-minute problems to deal with and ended up switching to wheels. A couple of impressive notes on that however, are that 1) we were able to switch drive modules from one side to another reversing the entire drive-train in about an hour. 2) we were able to change from treads to wheels in about an hour as well. These are both rather in-depth processes, and the fact that we were able to do them so painlessly speaks to the advantageous nature of the modular construction of our drive-train this year. I am currently working on the polycarbonate shield that wraps around the back of the robot, several things less robot-build-oriented such as planning of the pit for competition and putting together lists and forms for scouting other teams at competition. Scouting is a crucial, often over-looked among rookie teams, aspect of competition due to the complexity and spontaneity of FRC. As I discussed in the beginning of the season, matches consist of 2 alliances, each of which are made up of 3 teams (each with one robot). This means that from match to match, your alliance, and therefore the robots you are paired with and the strengths thereof change. A completely new match strategy must be designed based on robot and team strengths and weaknesses, as often as every 45 minutes during the tournament.


Based on a 30 lb repairs and upgrades rule, we withheld the Flinger (one of our various names for the shooting mechanism) in order to continue working on it. We encountered torque problems with the drive-train using only 2 CIM motors, so we changed to 4 on the drive-train. This means that we are no longer able to use a CIM motor on the Flinger (rules mandate no more than 4 CIMs on any one robot). Since bag n' tag we have been working on putting together a custom gearbox with inputs for up to 4 BaneBots 550 motors in lieu of a CIM. The likelihood that we will require all 4 to achieve the power we want in the Flinger is low. More likely we will end up using 2 or 3, however due to the incredible torque of the BB550, and our gearing down it may be possible to achieve the results we require with only 1 motor. Isaac Lozano was in charge of that project, and I helped out some when he wasn't around. Since then most of the parts have been fabricated, and we met for a small group session on Sunday with half a dozen of the mechanical team to get a good idea of what will be happening on the project, and prepare for it.
Since I last logged anything I worked on pneumatics for a short period (I was in charge of that subsystem), many mechanical people worked on the disaster that ending up not being tank treads. We had too many last-minute problems to deal with and ended up switching to wheels. A couple of impressive notes on that however, are that 1) we were able to switch drive modules from one side to another reversing the entire drive-train in about an hour. 2) we were able to change from treads to wheels in about an hour as well. These are both rather in-depth processes, and the fact that we were able to do them so painlessly speaks to the advantageous nature of the modular construction of our drive-train this year. I am currently working on the polycarbonate shield that wraps around the back of the robot, several things less robot-build-oriented such as planning of the pit for competition and putting together lists and forms for scouting other teams at competition. Scouting is a crucial, often over-looked among rookie teams, aspect of competition due to the complexity and spontaneity of FRC. As I discussed in the beginning of the season, matches consist of 2 alliances, each of which are made up of 3 teams (each with one robot). This means that from match to match, your alliance, and therefore the robots you are paired with and the strengths thereof change. A completely new match strategy must be designed based on robot and team strengths and weaknesses, as often as every 45 minutes during the tournament.

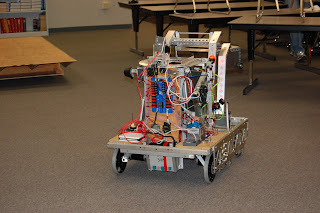
This is a picture of the robot on February 12th, things slowly coming together. In this picture one can see alligator clips attached to the motor powering the arm/scoop/appendage; we had been testing the functionality of the arm for the first time just that evening.

Here is a picture of the robot in action, the night of bagging. The programming and drive teams were getting one feverish night of practice in before the bot was sealed away.

Another shot of the bot in action, with the arm up in this one. The electronics boards are also visible from this viewpoint.
Subscribe to:
Posts (Atom)